System and Method for Continuous Subsurface Void Detection Beneath Roadway Surfaces Using Fleet-Vehicle-Mounted Acoustic Resonance Sensing and Edge-Deployed Spectral Convolutional Neural Networks
Abstract
Disclosed is a system and method for detecting subsurface voids, cavities, and soil deconsolidation zones beneath paved roadway surfaces by instrumenting ordinary municipal fleet vehicles (transit buses, refuse collection trucks, street sweepers) with undercarriage-mounted MEMS accelerometer arrays and contact microphones. The system exploits the tire-road coupling interface as a broadband acoustic excitation source, capturing the pavement's vibroacoustic response at frequencies between 20 Hz and 2 kHz as the vehicle traverses the road surface at normal operating speeds. An edge compute module running a spectral convolutional neural network (SCNN) trained on labeled ground-penetrating radar (GPR) ground-truth data classifies each 1-meter road segment in real time as intact, partially deconsolidated, or void-bearing, with estimated void depth and lateral extent. Multi-pass data from repeated fleet traversals are aggregated on a central server using Bayesian spatial fusion to build probabilistic void hazard maps that improve with each additional observation, enabling municipal public works departments to prioritize inspection and repair before surface collapse occurs.
Field of the Invention
This invention relates to infrastructure monitoring, specifically to the detection of subsurface voids and soil cavities beneath paved roadways using passive acoustic sensing from ordinary vehicles equipped with low-cost sensor arrays and on-device machine learning inference.
Background
Subsurface voids beneath roadways form through multiple mechanisms: dissolution of carbonate bedrock (karst), deterioration of aging stormwater and sewer infrastructure, compaction settlement of utility trench backfill, and erosion from broken water mains. The U.S. Geological Survey estimates that karst-related subsidence and sinkhole collapse alone cause $300 million or more in annual damages in the United States (Weary, 2015). Urban road collapses from non-karst void formation (pipe failures, utility tunneling) add substantially to this figure but are not tracked in a single national database. Japan's Ministry of Land, Infrastructure, Transport and Tourism reported over 3,000 road surface collapses annually during 2014-2018, with Tokyo alone experiencing 500+ per year.
Current subsurface void detection methods share a common limitation: they require dedicated survey campaigns with specialized equipment:
- Ground-penetrating radar (GPR): The primary tool for subsurface void detection. Commercial GPR systems (GSSI SIR-4000, Mala ProEx) cost $30,000-$200,000 and require trained operators. Survey speed is limited to 5-15 km/h for adequate resolution. A typical municipal GPR survey covers 10-50 lane-kilometers per day. At $2,000-$5,000 per lane-kilometer, comprehensive annual surveys of a medium-sized city's road network (2,000-5,000 lane-km) are prohibitively expensive. Most municipalities survey less than 5% of their road network annually.
- Impact-echo testing: Standardized as ASTM C1383, impact-echo excites a surface with a mechanical impactor and measures the resonant response to detect delaminations, voids, and thickness variations. The method requires stopping at each test point, placing a transducer, and recording. Throughput: 50-200 test points per day. Not viable for network-scale screening.
- Multichannel Analysis of Surface Waves (MASW): Park et al. (1999) demonstrated that Rayleigh wave dispersion analysis can characterize subsurface shear-wave velocity profiles. The method detects low-velocity anomalies indicative of voids, but requires a linear geophone array (12-48 channels) and active source. Like GPR, it demands a dedicated survey crew and stationary measurements.
- Visual inspection: The default method for most municipalities. Inspectors identify surface distress (cracking, settlement, ponding water) as proxies for subsurface conditions. By the time surface indicators appear, void growth is already advanced and collapse risk is elevated.
The gap in the art is a system that provides continuous, city-scale subsurface void screening without dedicated survey equipment, by leveraging the existing fleet of municipal vehicles that already traverse every road segment on a regular schedule.
Detailed Description
1. Physical Principle: Tire-Road Acoustic Coupling as Subsurface Probe
When a pneumatic tire rolls over a paved surface, it generates broadband vibroacoustic energy through three mechanisms: tire tread impact excitation (50-500 Hz), air pumping in tread grooves (500-2000 Hz per ISO 11819-2 CPX method), and suspension-transmitted axle vibration (5-50 Hz). This energy propagates through the pavement structure as body waves (compressional P-waves and shear S-waves) and surface waves (Rayleigh waves). In intact pavement over consolidated subgrade, the vibroacoustic response exhibits predictable spectral characteristics governed by the pavement layer thicknesses and material stiffnesses.
A subsurface void alters this response in three detectable ways. First, the void acts as a Helmholtz-type resonator, introducing a low-frequency spectral peak whose frequency is inversely related to the void's effective volume. For a spherical void of radius r at depth d beneath a pavement slab of thickness h, the resonant frequency is approximately:
fvoid ≈ (c / 2π) × √(A / (V × Leff))
where c is the speed of sound in the void medium (~343 m/s for air), A is the effective coupling area through pavement cracks and pores, V is the void volume, and Leff is the effective neck length. For typical urban voids (0.3-3 m diameter, 0.5-3 m depth), this produces resonances in the 15-120 Hz range.
Second, the void reduces the effective stiffness of the pavement system above it, shifting the dominant Rayleigh wave dispersion curve toward lower phase velocities at wavelengths comparable to the void depth. Third, the void creates a local impedance mismatch that generates characteristic reflected wave arrivals detectable as temporal echoes in the accelerometer signal.
2. Sensor Module Hardware
Each sensor module comprises: a linear array of three MEMS accelerometers (e.g., Analog Devices ADXL355, ±40 g range, 22-bit resolution, noise density 25 μg/√Hz) mounted in a rigid aluminum bracket at 0.5 m spacing along the vehicle's longitudinal axis; two contact microphones (piezoelectric film, 20 Hz-5 kHz bandwidth) mounted flush with the vehicle undercarriage at 30 cm ground clearance, coupled to the chassis through vibration-isolating mounts; a GNSS receiver (u-blox ZED-F9P, RTK-capable, 2 cm horizontal accuracy with corrections) for precise geo-referencing of each measurement to ±0.5 m road position; an edge compute unit (NVIDIA Jetson Orin Nano, 40 TOPS INT8) for real-time inference; and a 4G/LTE cellular modem for periodic data upload (aggregated results only, not raw waveforms). Target hardware cost per vehicle: $800-$1,200.
3. Data Acquisition Pipeline
Accelerometer and microphone channels sample simultaneously at 4,096 Hz (accelerometers) and 8,192 Hz (microphones) using a shared clock reference. The system segments data into 1-meter road increments using GNSS position fixes. For each 1-meter segment, the pipeline computes: a 2,048-point FFT power spectrum per channel (frequency resolution: 2 Hz for accelerometers, 4 Hz for microphones); cross-spectral density between the front and rear accelerometer pair, yielding the coherence function and phase delay as a function of frequency; a Rayleigh wave phase velocity dispersion estimate from the inter-accelerometer phase delay at frequencies where coherence exceeds 0.7; and a short-time temporal autocorrelation of each accelerometer channel to detect reflected wave arrivals (echo signatures).
Vehicle speed is constrained to 15-60 km/h for valid measurements. Below 15 km/h, tire-road excitation energy is insufficient for reliable spectral analysis. Above 60 km/h, the dwell time over a 1-meter segment (<60 ms) provides fewer than 250 samples per segment, degrading frequency resolution. The system monitors vehicle speed via GNSS and flags segments acquired outside the valid range.
4. Spectral Convolutional Neural Network (SCNN) Classifier
The core classification model is a 1D spectral CNN that ingests a multi-channel feature vector for each 1-meter segment. Input dimensions: 5 channels × 1,024 frequency bins (trimmed to the 2 Hz-2,048 Hz range). The 5 channels are: vertical accelerometer power spectrum (front), vertical accelerometer power spectrum (rear), front-rear cross-spectral coherence, front-rear phase delay, and contact microphone power spectrum (averaged left-right).
Architecture: 4 convolutional blocks, each containing a 1D convolution (kernel size 7, stride 1) with 32/64/128/256 filters respectively, batch normalization, GELU activation, and max pooling (pool size 2). The convolutional stack output feeds a 512-unit dense layer, followed by a multi-head output:
- Classification head: 3-class softmax (intact / partially deconsolidated / void-bearing). The "partially deconsolidated" class captures the transitional state where soil has lost density but a discrete air-filled cavity has not yet formed.
- Regression head: 2-unit linear output predicting estimated void centroid depth (meters below pavement surface) and estimated void lateral diameter (meters). Active only when classification output is "void-bearing" with confidence > 0.6.
The model is trained on paired data: vehicle sensor recordings co-located with GPR survey results from 500+ lane-kilometers of calibration routes. GPR provides ground-truth void locations, depths, and extents. Training data augmentation includes: speed-dependent spectral warping (to generalize across acquisition speeds), additive noise injection at realistic urban background levels, and synthetic void spectra generated from finite-element pavement models (LS-DYNA) with parametrically varied void geometries.
The SCNN is quantized to INT8 and deployed on the Jetson Orin Nano. Inference time: < 5 ms per 1-meter segment, well within the real-time budget at 60 km/h (60 ms per segment).
5. Bayesian Spatial Fusion for Multi-Pass Aggregation
A single vehicle pass provides a noisy measurement with moderate false-positive rates (estimated 15-25% for isolated passes, depending on road surface type and condition). The system's key advantage over dedicated surveys is that fleet vehicles repeatedly traverse the same road segments on predictable schedules. A transit bus on a fixed route may pass the same point 20-40 times per day. A refuse truck covers its entire collection zone weekly.
The central aggregation server maintains a probabilistic void hazard map as a spatial grid (1 m × 1 m cells, aligned to a local coordinate reference). For each cell, the server maintains a Beta distribution posterior parameterized by (α, β), representing the probability that the cell contains a void. Each vehicle pass contributes a Bayesian update:
- If the SCNN classifies the segment as void-bearing with confidence p: α ← α + p, β ← β + (1 - p)
- If the SCNN classifies the segment as intact with confidence p: α ← α + (1 - p), β ← β + p
- A temporal decay factor (λ = 0.998 per day) gradually reduces both α and β toward the prior, ensuring the map responds to new void formation and does not permanently retain stale measurements.
After 10-20 independent passes over a void-bearing segment, the posterior probability converges above 0.9, suppressing false positives while maintaining detection sensitivity. The server generates alert notifications when any cell's posterior exceeds a configurable threshold (default: 0.85) and the estimated void depth is less than 3 meters (indicating near-surface collapse risk).
6. Confound Mitigation
Several road conditions produce vibroacoustic signatures that could mimic subsurface voids:
- Utility cuts and patches: Recently repaved trenches have different stiffness than surrounding pavement but do not indicate voids. The SCNN training set includes labeled examples of fresh and aged utility patches. Additionally, the system ingests municipal utility cut permit data (where available) as a prior to reduce false positives at known patch locations.
- Bridge deck joints and expansion gaps: Produce characteristic high-amplitude transient signatures at known locations. The system geo-fences bridge structures using OpenStreetMap data and suppresses void classification within 5 meters of tagged bridge features.
- Speed bumps and rumble strips: Generate periodic excitation patterns distinguishable from void resonances by their spatial regularity. A periodicity detector in the preprocessing stage identifies and flags these features.
- Variable pavement types: Asphalt, concrete, and composite pavements have distinct baseline spectral signatures. The SCNN includes a pavement-type embedding layer trained on road surface classification, allowing the void detection heads to condition on pavement type.
7. Fleet Integration and Deployment Model
The system targets three municipal fleet categories with high road-coverage density:
- Transit buses: Fixed routes, 12-18 hours/day operation, high repeat frequency on arterial roads. A 200-bus fleet covers 500-1,000 unique lane-km daily.
- Refuse collection trucks: Systematic neighborhood coverage on weekly cycles. A 50-truck fleet covers the entire residential street network within one collection cycle.
- Street sweepers: Already operate at 15-25 km/h (optimal acquisition speed range), cover curb lanes comprehensively. A 20-sweeper fleet covers all swept roads monthly.
Sensor modules are installed during scheduled vehicle maintenance. No vehicle modification is required beyond bolting the sensor bracket to existing undercarriage mounting points and connecting power to the vehicle's 12V/24V electrical system. Installation time: approximately 2 hours per vehicle.
8. Figures Description
- Figure 1: System architecture showing fleet vehicles with sensor modules, cellular data upload, central aggregation server, and probabilistic void hazard map output with municipal integration points.
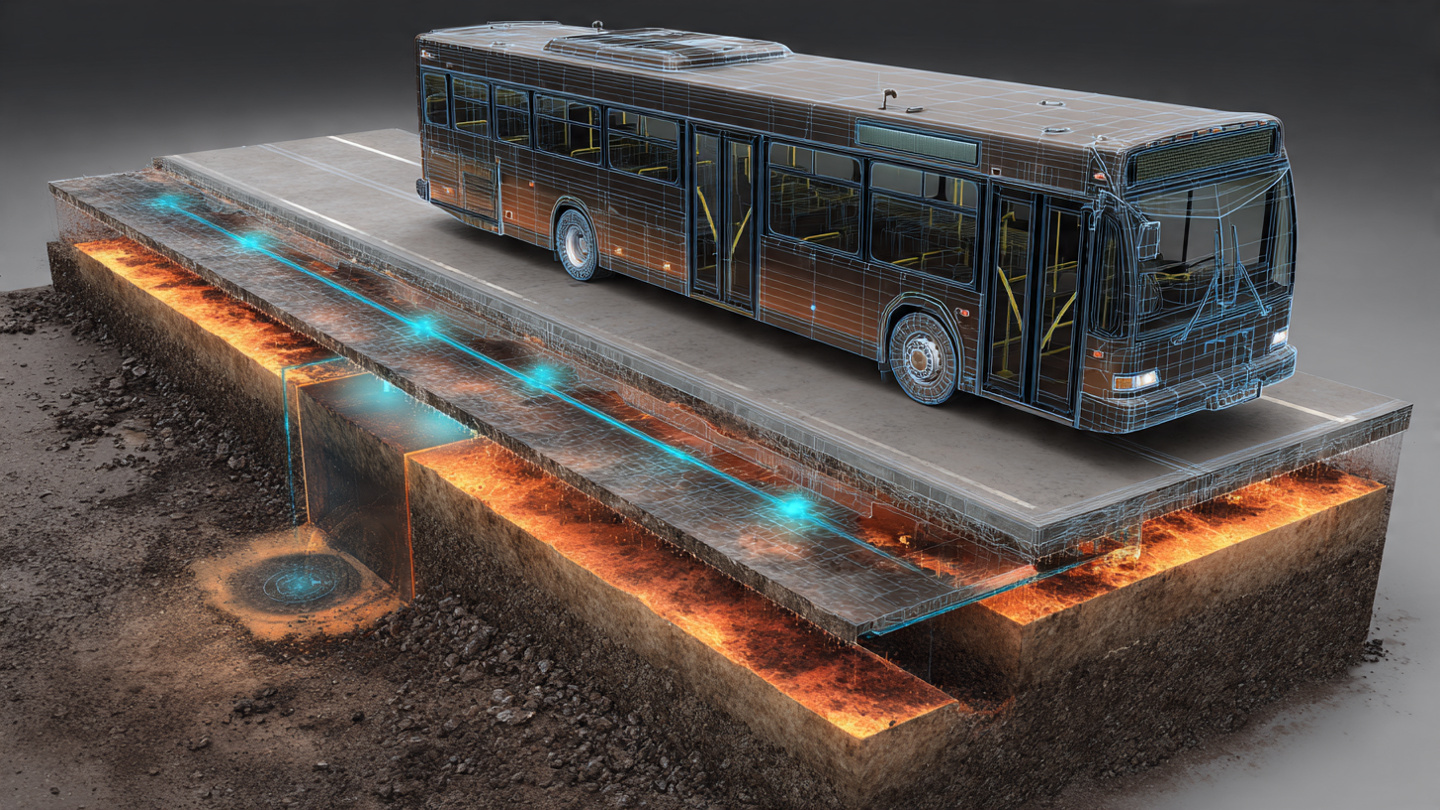
- Figure 2: Cross-section diagram of tire-road-subgrade system showing acoustic wave propagation paths over intact pavement versus pavement with a subsurface void, illustrating Helmholtz resonance, Rayleigh wave dispersion shift, and impedance-mismatch reflection.
- Figure 3: Example multi-channel spectral feature arrays for three road condition classes (intact, deconsolidated, void-bearing), showing the characteristic low-frequency resonance peak and coherence reduction associated with void presence.
- Figure 4: Bayesian posterior convergence plot showing void detection probability as a function of number of independent vehicle passes, demonstrating false-positive suppression after 10-20 passes.
- Figure 5: City-scale void hazard map overlay on road network, with color-coded risk levels and estimated void parameters for prioritized inspection targets.
Claims
- A system for detecting subsurface voids beneath paved roadway surfaces, comprising: one or more fleet vehicles each equipped with a sensor module containing a plurality of MEMS accelerometers and contact microphones mounted to the vehicle undercarriage, a GNSS receiver for geo-referencing measurements, and an edge compute unit; wherein the sensor module continuously acquires vibroacoustic data generated by the tire-road coupling interface as the vehicle traverses road surfaces at normal operating speeds, and the edge compute unit classifies each geo-referenced road segment as intact, partially deconsolidated, or void-bearing using a spectral convolutional neural network operating on frequency-domain features extracted from the sensor data.
- The system of claim 1, wherein the spectral convolutional neural network ingests a multi-channel feature vector comprising vertical accelerometer power spectra from spatially separated sensors, cross-spectral coherence between sensor pairs, inter-sensor phase delay as a function of frequency, and contact microphone power spectra.
- The system of claim 1, wherein the neural network further comprises a regression head that estimates the depth and lateral extent of detected voids when classification confidence exceeds a configurable threshold.
- The system of claim 1, further comprising a central aggregation server that receives geo-referenced classification results from multiple fleet vehicles and maintains a probabilistic void hazard map using Bayesian spatial fusion, wherein repeated independent observations of the same road segment by different vehicles or on different passes reduce false-positive rates through posterior probability convergence.
- The system of claim 4, wherein the Bayesian spatial fusion applies a temporal decay factor to prior observations, allowing the hazard map to respond to newly formed voids and to discount stale measurements from road segments that have been repaired.
- A method for continuous city-scale subsurface void monitoring comprising: instrumenting a fleet of municipal vehicles with undercarriage-mounted vibroacoustic sensor arrays; acquiring accelerometer and contact microphone data during normal fleet operations; computing frequency-domain feature representations for geo-referenced road segments; classifying each segment using an on-device spectral neural network trained on ground-penetrating radar ground-truth data; and aggregating classification results across multiple vehicles and passes using Bayesian spatial fusion to generate probabilistic void hazard maps.
- The method of claim 6, wherein the tire-road coupling interface serves as the acoustic excitation source, and no active excitation device is required, enabling passive subsurface sensing during normal vehicle operation without speed reduction or route deviation.
- The method of claim 6, further comprising confound mitigation steps including: geo-fencing bridge structures and expansion joints, ingesting municipal utility cut permit data to suppress false positives at known trench locations, detecting periodic spatial features indicative of speed bumps or rumble strips, and conditioning void classification on an automatically determined pavement type.
- The method of claim 6, wherein the spectral convolutional neural network is trained on paired data comprising vehicle sensor recordings co-located with ground-penetrating radar survey results, augmented with synthetic void spectra generated from finite-element pavement models with parametrically varied void geometries.
- The system of claim 1, wherein the sensor module has a per-vehicle hardware cost below $1,500, requires no structural modification to the vehicle, installs in under four hours during scheduled maintenance, and operates autonomously without driver interaction.
Implementation Notes
Calibration requires a one-time GPR survey of 50-100 lane-kilometers of representative roads within the deployment municipality, covering the range of pavement types, ages, and known void locations. This calibration dataset, combined with synthetic augmentation, trains the deployment-specific SCNN. Transfer learning from a pre-trained base model (trained on multi-city data) reduces the calibration requirement to approximately 20 lane-kilometers for subsequent deployments.
The system operates as a screening tool that prioritizes GPR follow-up surveys rather than replacing them. A municipality deploying 100 instrumented vehicles could achieve full road-network coverage within one week and continuous monitoring thereafter, directing its limited GPR survey budget to the highest-risk segments identified by the fleet sensing system.
Prior Art References
- Weary, D.J. (2015). "The cost of karst subsidence and sinkhole collapse in the United States compared with other natural hazards." U.S. Geological Survey. $300M+ annual damages from karst subsidence.
- Park, C.B., Miller, R.D., Xia, J. (1999). "Multichannel analysis of surface waves." Geophysics, 64(3), 800-808. Foundation for MASW methodology.
- ASTM C1383-15(2022). Standard Test Method for Measuring the P-Wave Speed and the Thickness of Concrete Plates Using the Impact-Echo Method.
- ISO 11819-2:2017. Acoustics — Measurement of the influence of road surfaces on traffic noise — Part 2: The close-proximity method. Tire-road noise measurement framework.
- Fang, Y. et al. (2025). "Intelligent recognition of subsurface utilities and voids: A ground penetrating radar dataset for deep learning applications." PMC. GPR + deep learning for void detection.
- US7532541B2. Method and apparatus for detecting buried objects using acoustic resonance. Acoustic detection of buried objects (not fleet-based, not ML-classified).
- US20130335257A1. Method and device for searching through collapsed ground. Post-collapse search (not predictive pre-collapse screening).
- Lee et al. (2025). "Vibration Analysis and Vehicle Detection by MEMS Acceleration Sensors Embedded in PCC Pavement." MEMS accelerometers in pavement (road-embedded, not vehicle-mounted).
- Road surface anomaly detection using vehicle-mounted accelerometers. Applied Sciences. Surface defect detection (not subsurface void characterization).
- Development of Impact-Echo Multitransducer Device for Automated Concrete Homogeneity Assessment. PMC. Stationary impact-echo, not passive vehicle-based sensing.
- Helmholtz resonance. Wikipedia. Physical basis for cavity resonant frequency estimation.
- Analog Devices ADXL355. Low-noise MEMS accelerometer datasheet (25 μg/√Hz, ±40 g).
- u-blox ZED-F9P. Multi-band GNSS module with RTK capability (2 cm accuracy).
- NVIDIA Jetson Orin Nano. Edge AI compute module (40 TOPS INT8).